thomas.vontobel.robo@bluewin.ch
+41 79 566 29 81
Grubenstrasse 21b
Werkstatt 403
8045 Zürich
In der Arbeit mit kinetischen Skulpturen befasse ich mich mit Bewegung, Bewegungssteuerung, Raum und Zeit. Die akustische Dimension gewinnt an Bedeutung.

Gewisse Maschinen erscheinen mir wie einfache Lebewesen und Lebewesen scheinen mehr maschinenähnliche Eigenschaften in sich zu haben, als wir gemeinhin annehmen. Die Welt der künstlichen Wesen erlebe ich als Parallelwelt zur natürlichen Welt. In beiden Welten sind die Akteure auf die Selbstwahrnehmung und auf die Wahrnehmung ihrer Umgebung angewiesen. Es stellen sich Fragen der Sensorik und deren Interpretation. Die Arbeit mit kinetischen Skulpturen steigert meine Aufmerksamkeit für die natürliche Welt.

Ausbildung
1977 – 1982
Schule für Gestaltung Zürich, Vorkurs, Werklehrerausbildung
2005 – 2007
Zürcher Hochschule der Künste, Studiengang Vermittlung Gestaltung und Kunst
Vermittlung
1982 – 2018
Lehrer für Bildnerisches Gestalten, Kantonsschule Rämibühl MNG, Zürich
1986 – 2007
Lehrer für Zeichnen und Modellieren, Kantonale Strafanstalt Pöschwies
Das Gedankenexperiment des Kybernetikers Valentin Braitenberg, in welchem er das Verhalten ausgedachter künstlicher Wesen zuerst von der äusseren und anschliessend von der technischen Perspektive beschreibt, inspiriert meine Arbeit und gab Impulse für Schulprojekte. Die Inspiration ist sowohl gedanklicher als auch materieller Art. Auch Erkenntnisse aus der KI-Forschung, beispielsweise „Intelligenz braucht einen Körper“, finde ich bemerkenswert.
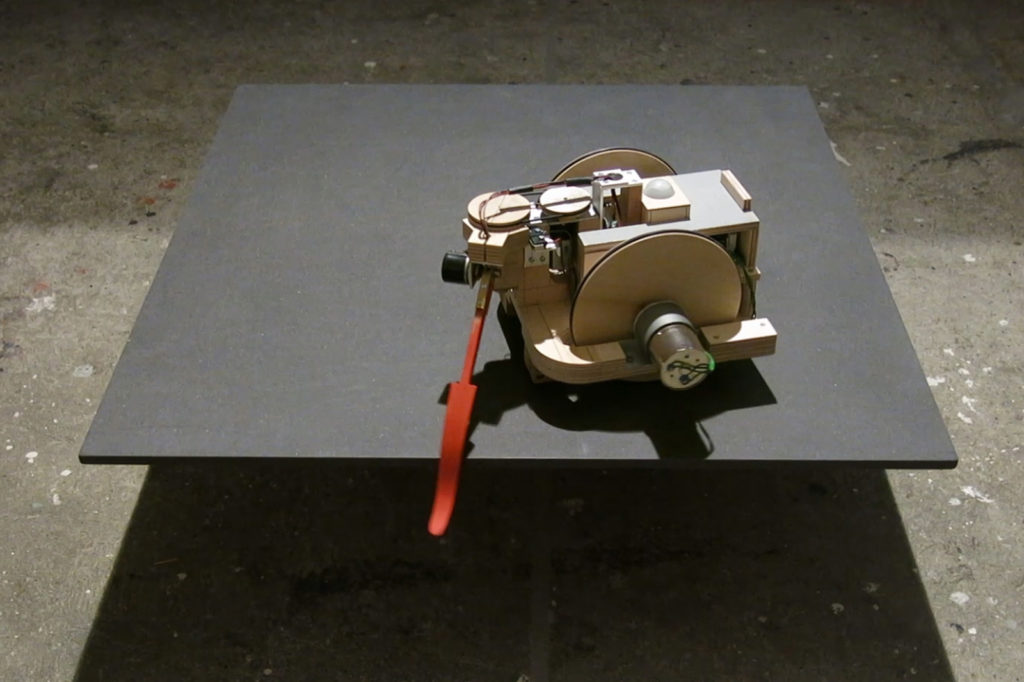
Umgebungsbezogene, sensorbasierte, analoge Bewegungssteuerung. Die geeignete Körperform entwickelte sich in einer Abfolge von vielen Versuchen.
umgebungsbezogene, sensorbasierte, analoge Bewegungssteuerung.
Das künstliche Wesen wechselt zwischen den Verhaltensmodi „lichthungrig“ und „lichtscheu“. Nach einigen Hinderniskontakten im Dunkeln macht es Pause. Nach Absolvierung der Pausen bewegt es sich für eine gewisse Zeit wieder dem Licht zu, bevor wieder Dunkelheit angestrebt wird.
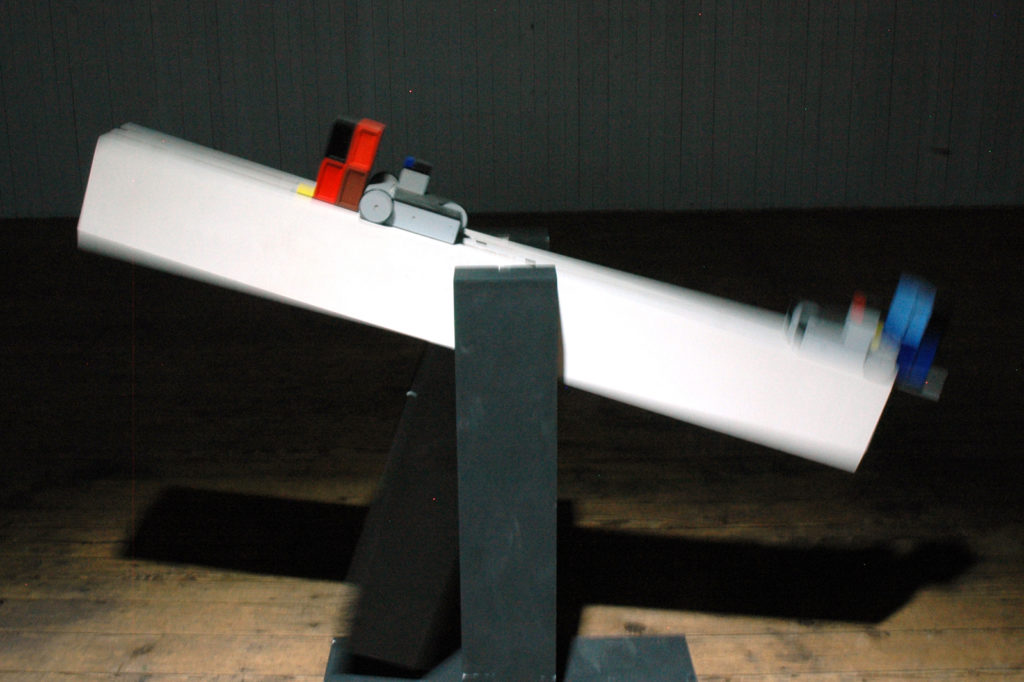
Meine kinetischen Skulpturen verschleissen sich durch ihre Aktivität. Die Wiederholung ihrer Bewegungen sind nie genau gleich und können zu jedem Zeitpunkt eine neue Bedeutung erhalten, weil sie in einer realen Umwelt agieren. Die Möglichkeit der Überraschung, des Defektes oder der Fehlleistung ist allgegenwärtig.
Schulprojekte:
Experiemente mit künstlichen Wesen (Braitenberg Vehikel)
analog gesteuerte Roboter.
„Dichtestress“
analog gesteuerte Roboter.