Drei baugleiche Roboter mit identischen Verhaltensprogrammen wechseln zwischen Stehen und Liegen. Impuls zum Aufstehen gibt ein akustisches Ereignis und ihre innere Uhr. Die Schallempfindlichkeit der künstlichen Wesen ist anfänglich sehr gering und wird im Verlauf des Wartens grösser. Nach dem Aufstehen, oft alle gleichzeitig, legen sie sich nach einer individuellen Stehzeit wieder hin. Nach dieser Aktivität ist die Schallempfindlichkeit zunächst wieder gering.
Die gelenkigen Figuren nehmen balancierend Haltung an. Haltungsänderungen erfolgen durch kleine Gewichtsverschiebungen. Die Ausrichtung der Körperteile wird in Regelkreisen gesteuert.
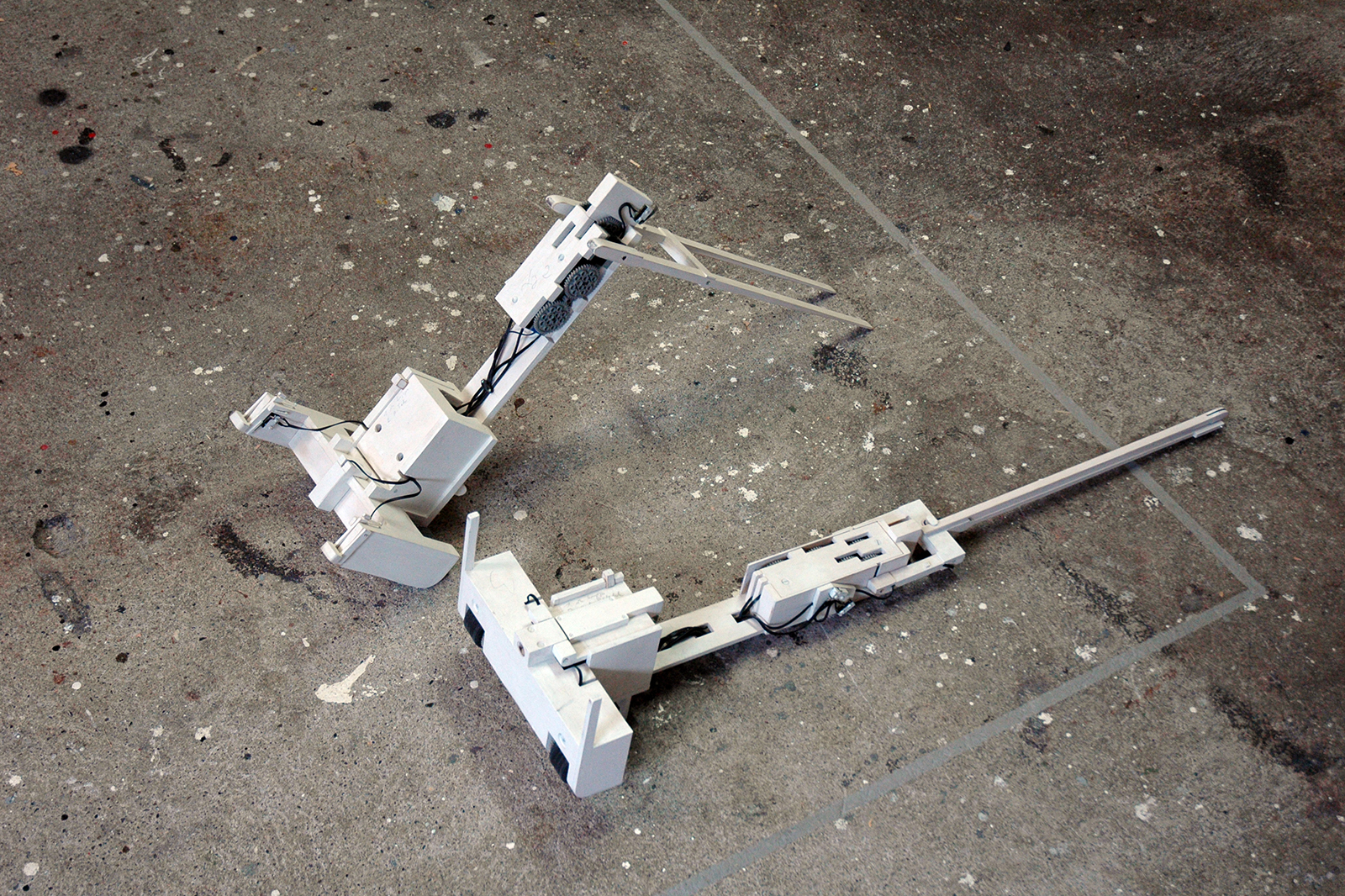
Figur_64 bewegt sich durch Gewichtsverschiebung im Rumpf und durch Propellerantrieb im Kopf. Den Kopf hält sie durch dosierten Propellereinsatz aufrecht. Die aufrechte Haltung zeigt sich im Pendeln zwischen wenig Vor- und Rücklage. Nach einer gewissen Stehzeit kippt die Figur in die Waagrechte und erhebt sich erst wieder, wenn sie ein bewegtes Gegenüber wahrnimmt.
Drei Figuren halten sich mit dosiertem Propellereinsatz aufrecht. Die stehende Haltung präsentiert sich als unruhiger Zustand. Nachlassende Propellerleistung führt zu Rücklage auf welche mit anschwellendem Propellereinsatz reagiert wird. Die Figuren senden und empfangen Lichtsignale und erhalten so möglicherweise einen Aufstehimpuls. Erst die Erwiderung eines empfangenen Lichtsignals, bzw. ein beantwortetes eigenes Lichtsignal löst das Aufstehen aus. Die zwei rot funkenden Figuren sind diesbezüglich gut positioniert. Die blau funkende Figur steht ungünstig, kann von den Nachbarfiguren keine Signale empfangen und ist auf Impulse von anderswo angewiesen. Die drei Figuren agieren autonom.
Die zwei liegenden Figuren warten auf ein Lichtsignal ihrer Nachbarfigur. Die Erwiderung eines empfangenen Lichtes gibt den Aufstehimpuls. Es gibt keine Hierarchie der zwei Figuren. Sie sind mit identischen Verhaltensprogrammen ausgestattet und agieren autonom. Wann und welche als erste die Initiative ergreift ist nicht bestimmt, die individuelle Dauer des Stehens nicht voraussehbar.